Industry Experience
From summer 2007 to summer 2009, I worked at the Jet Propulsion Laboratory in Pasadena, CA on the Mars Science Laboratory "Curiosity" rover, a robot exploring Mars to determine whether the environment was once capable of supporting life. I created the Contact Sensor / Stabilizer for the rock drill at the end of the robotic arm. The drill bores holes in rocks and collects the particulates for analysis by onboard scientific instruments; the Contact Sensor / Stabilizer senses contact between the drill and the rock, braces the drill against the rock during operation, and can help the drill push itself out of the rock should it become stuck. Required to survive the harsh conditions of launch, landing, and the Martian surface, the design also had to support very high magnitude axial and lateral loads while respecting tight volume constraints.
Two "prongs", the only components of the mechanism clearly visible in the photos below, contact the surface of the rock. Each prong is supported by a planar four-bar linkage, which allows the prong to translate along the axis of the drill to accomodate the surface of the rock. The two four-bar linkages are coupled by a third, compliant four-bar linkage such that when only one prong touches the rock, the other prong is pushed forward. When the second prong contacts the rock and a specific preload is reached, a switch in the third, compliant linkage signals that contact has been acheived.
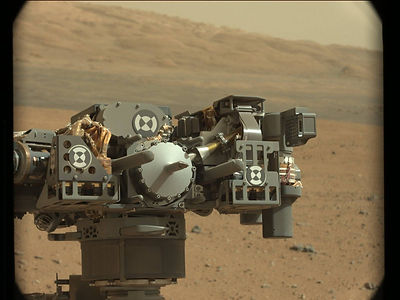

The "prongs" are two the cylindrical protrusions diametrically opposed about the drill bit in the center.
Image: NASA/JPL-Caltech, “Mastcam: Left 2012-09-08 01:07:43 utc,” September 2012, retrieved November 11, 2013. [Online].
The Contact Sensor / Stabilizer is compliant to accomodate rock contours and arm misalignment.
Image: NASA/JPL-Caltech, "Front hazcam: Right A 2013-01-27 18:25:41 utc,” January 2013, retrieved November 11, 2013. [Online]